操作系统复习笔记3-进程管理
此部分内容为笔者大二下学期的复习笔记摘过来的。
Ⅲ进程管理
一、进程与线程
进程概念的引入
两个基本概念:并发与并行
- 顺序执行
- 并发Concurrent:设有两个活动a1和a2,如 果在某一指定的时刻t,无论a1和a2是在同一 处理机上还是在不同的处理机上执行,只要 a1和a2都处在各自的起点和终点之间的某一 处,则称a1和a2是并发执行的。
- 并行Parallel:如果考虑两个程序,它们在同一 时间度量下同时运行在不同的处理机上,则 称这两个程序是并行执行的。
并发性的确定-Bernstein条件
定义:
- R(Si):Si的读子集, 其值在Si中被引用的变量的集合
- W(Si):Si的写子集, 其值在Si中被改变的变量的集合
Bernstein条件:
- 两个进程S1和S2可并发,当且仅当下列条件同时成 立:
- R(S1) ∩ W(S2) = Φ
- W(S1) ∩ R(S2) = Φ
- W(S1) ∩ W(S2) = Φ
判断程序并发执行结果是否可再现的充分条件。
进程的定义
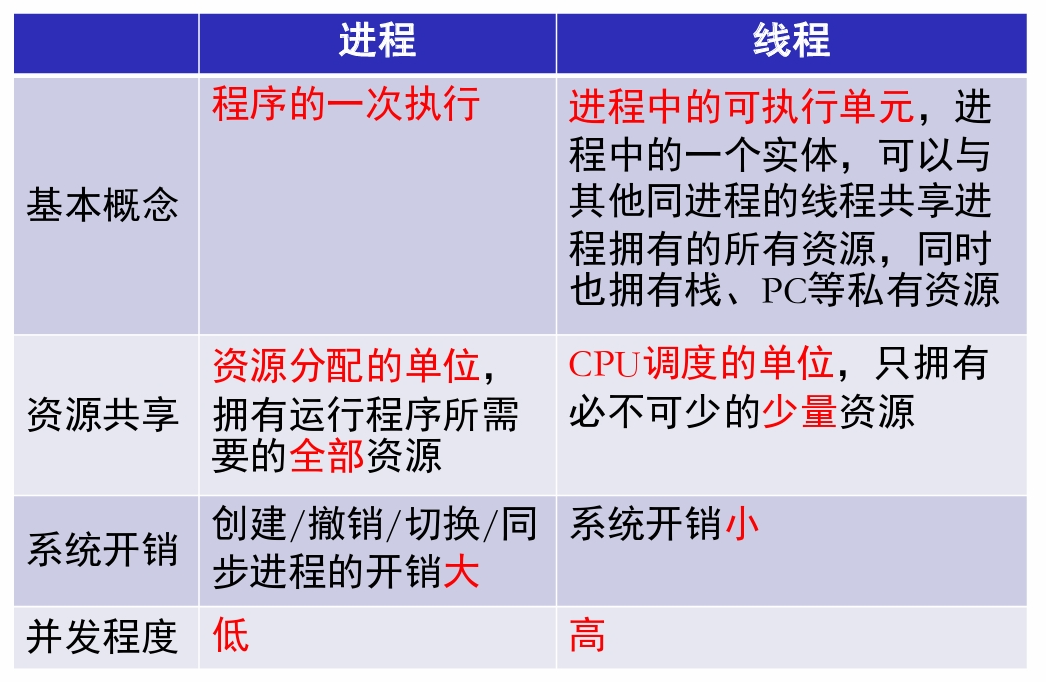
- 进程是程序的一次执行;
- 进程是可以和别的计算并发执行的计算;
- 进程可定义为一个数据结构,及能在其上进行操 作的一个程序;
- 进程是一个程序及其数据在处理机上顺序执行时 所发生的活动;
- 进程是程序在一个数据集合上运行的过程,它是 系统进行资源分配和调度的一个独立单位。
进程的特征
- 动态性:进程是程序的一次执行过程,因创建而产 生,因调度而执行,因无资源而暂停,因撤消而消 亡;而程序是静态实体。
- 并发性:多个进程实体同时存在于内存中,能在一 段时间内同时运行。
- 独立性:在传统OS中,进程是独立运行的基本单位
- 异步性:也叫制约性,进程之间相互制约,进程以 各自独立的不可预知的速度向前推进。
- 结构特征:程序、数据、进程控制块PCB
一个进程应该包括
- 程序的代码;
- 程序的数据;
- PC中的值,用来指示下一条将运行的指令;
- 一组通用的寄存器的当前值,堆、栈;
- 一组系统资源(如打开的文件)
进程与程序的区别
- 进程是动态的,程序是静态的:程序是有序代码的集 合;进程是程序的执行。通常进程不可在计算机之间 迁移;而程序通常对应着文件,静态和可以复制。
- 进程是暂时的,程序是永久的:进程是一个状态变化 的过程,程序可长久保存。
- 进程与程序的组成不同:进程的组成包括程序、数据 和进程控制块(即进程状态信息)。
- 进程与程序的对应关系:通过多次执行,一个程序可 对应多个进程;通过调用关系,一个进程可包括多个 程序。
进程状态与控制
进程控制
进程控制的主要任务是创建和撤消进程 ,以及实现进程的状态转换。由内核来 实现。
进程的创建
- 提交一个批处理作业
- 用户登录
- 由OS创建,用以向一个用户提供服务
- 由已存在的一进程创建
进程撤消
- 用户退出登录
- 进程执行一个中止服务的请求
- 出错及失败因素
- 正常结束
- 给定时限到
- 原语:由若干条指令所组成的指令序列,来实 现某个特定的操作功能
- 指令序列执行是连续的,不可分割
- 是操作系统核心组成部分
- 必须在管态(内核态)下执行,且常驻内存
- 与系统调用的区别
- 不可中断
- 进程图
- 创建原语(fork, exec)
- 撤消原语(kill)
- 释放资源、撤 消子进程、重 新调度。
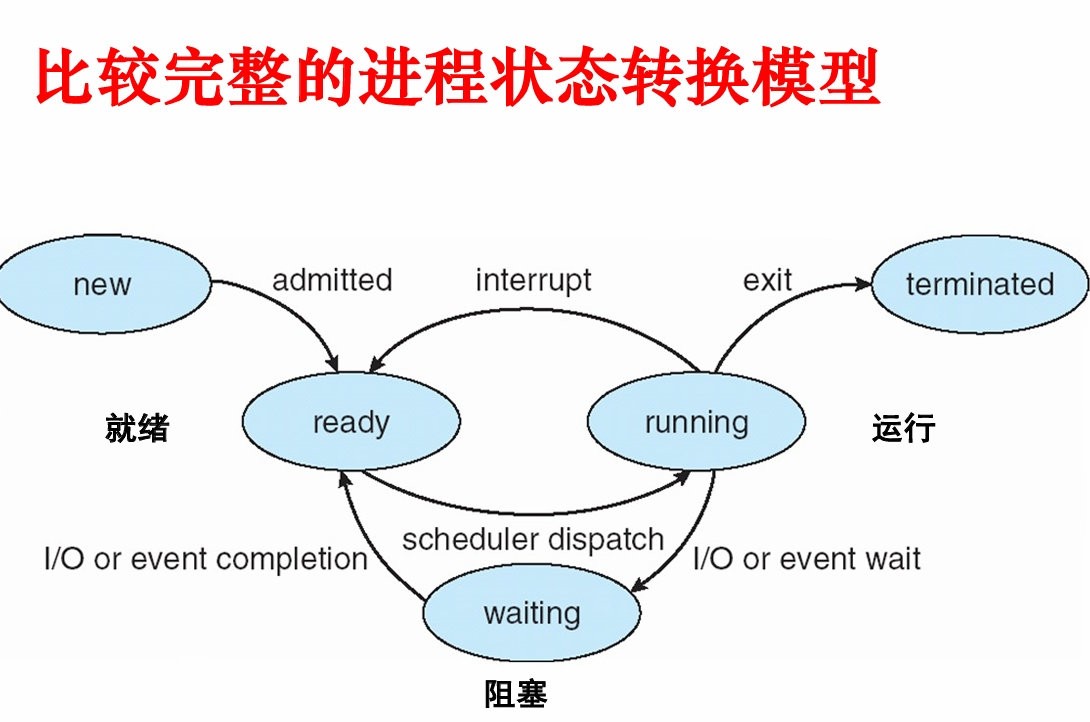
进程状态及其演变
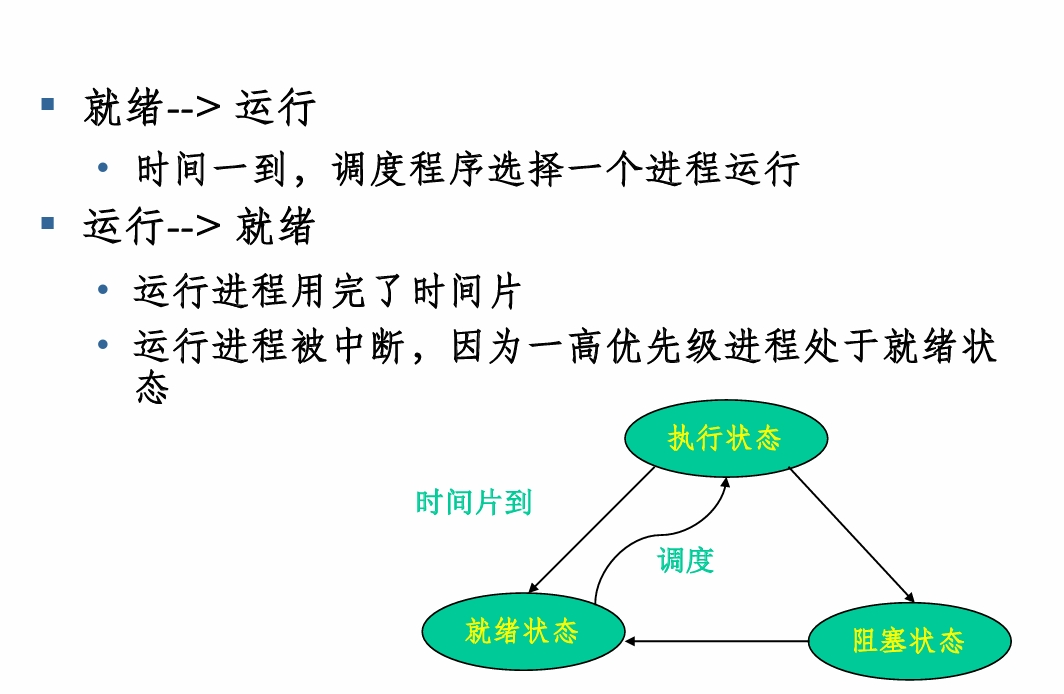
进程的三种基本状态
- 就绪状态:进程已获得除处理机外的所需资源 ,等待分配处理机资源;只要分配CPU就可执 行。
- 执行状态:占用处理机资源;处于此状态的进 程的数目小于等于CPU的数目。在没有其他进 程可以执行时(如所有进程都在阻塞状态), 通常会自动执行系统的idle进程(相当于空操作 )。
- 阻塞状态:正在执行的进程,由于发生某种事 件而暂时无法执行,便放弃处理机处于暂停状 态。

进程控制块
- 系统为每个进程定义了一个数据结构:进程控制 块PCB(Process Control Block)。
- 作用:
- 进程创建、撤消;
- 进程唯一标志;
- 进程控制块是进程管理和控制的最重要的数据结 构,每一个进程均有一个PCB,在创建进程时, 建立PCB,伴随进程运行的全过程,直到进程撤 消而撤消。

PCB的组织方式
- 线性表:不论进程的状态如何,将所有 的PCB连续地存放在内存的系统区。这种方 式适用于系统中进程数目不多的情况。
- 链接方式:该方式是线性表方式的改进 ,系统按照进程的状态分别建立就绪索引 表、阻塞索引表等。
- 索引方式:系统按照进程的状态将进程的PCB 组成队列,从而形成就绪队列、阻塞队列、运行 队列等。
辨析:进程上下文切换vs 陷入内核
-
进程上下文切换(Process Context Switch)
- 通常由调度器执行
- 保存进程执行断点
- 切换内存映射(页表基址、flush TLB)
-
陷入/退出内核(也称为模态切换, Mode Switch) •
- CPU状态改变
- 由中断、异常、Trap指令(系统调用)引起
- 需要保存执行现场(寄存器、堆栈等)
-
系统调用涉及到进程从用户态到内核态的切 换(mode switch),这个时候涉及到的切换 主要是寄存器上下文的切换,和通常所说的 进程上下文切换(Process Context Switch)不 同,mode switch 的消耗相对要小很多。
线程概念的引入
线程(thread)的提出
- 进程的不足:
- 进程只能在一个时间处理一个任务,不能同时处理多 个任务。
- 如果进程在执行时阻塞,整个进程都无法继续执行。 例如:在等待输入时,即使进程中有些处理不依赖于 输入数据,也将无法执行。
- 需要提出一种新的实体,满足以下特性:
- 实体之间可以并发地执行;
- 实体之间共享相同的地址空间;
进程与线程
调度
- 实际上,进程包含了两个概念
- 资源拥有者
- 可执行单元
- 现代操作系统将资源拥有者称为进程(process, task),将可执行单元称为线程(Thread)。
并发性
- 多进程:多个程序可以并发执行,改善资源使 用率,提高系统效率
- 多线程:并发粒度更细(任务级并行)、并发 性更好
拥有资源
- 线程间可以共享资源
进程的资源:虚拟地址空间、进程映像、处理机保护、文件、 I/O
线程的资源:运行状态、上下文(如:程序计数器)、执行栈。
系统开销
- 进程
- 创建/撤销时需要分配/回收大量资源
- 进程切换时涉及运行环境的保存与设置
- 进程间的同步需要借助消息通信机制。
- 线程:由于资源共享,有效减少了创建/撤 销/切换/同步等所造成的开销
小结
引入线程的优势
- 线程很轻量:容易创建、撤销
- 有些应用要求并行实体具备共享同一个地址空间 和所有可用数据的能力
- 创建一个线程比一个进程快10-100倍
- 对于存在大量计算和大量I/O处理的应用,大幅度 提高性能
- 在多CPU/多核CPU系统中更有优势
进程v.s.线程
线程的实现方式
用户级线程
-
线程在用户空间,通过 library模拟的thread,不需 要或仅需要极少的kernel支 持
-
上下文切换比较快,因为不用 更改page table等,使用起来 较为轻便快速.
-
提供操控视窗系统的较好的 解决方案.
-
用户级的线程库的主要功能
–创建和销毁线程
–线程之间传递消息和数据
–调度线程执行
–保存和恢复线程上下文
-
典型的例子
–POSIX Pthreads
–Mach C-threads
–Java Threads
-
优点
- 线程切换与内核 无关
- 线程的调度由应 用决定,容易进 行优化
- 可运行在任何操 作系统上,只需 要线程库的支持
-
不足
- 很多系统调用会引 起阻塞,内核会因 此而阻塞所有相关 的线程。
- 内核只能将处理器 分配给进程,即使 有多个处理器,也 无法实现一个进程 中的多个线程的并 行执行。
内核级线程
-
内核级线程就是kernel有 好几个分身,一个分身可 以处理一件事.
-
这用来处理非同步事件 很有用, kernel可以对每 个非同步事件产生一个 分身来处理.
-
支持内核线程的操作系 统内核称作多线程内核
-
优点
- 内核可以在多个处 理器上调度一个进 程的多个线程实现 同步并行执行
- 阻塞发生在线程级 别
- 内核中的一些处理 可以通过多线程实 现
-
缺点
- 一个进程中的线程 切换需要内核参与, 线程的切换涉及到 两个模式的切换 (进程-进程、线 程-线程)
- 降低效率
用户级线程和内核级线程的比较
- 内核级线程是OS内核可感知的,而用户级线程 是OS内核不可感知的。
- 用户级线程的创建、撤消和调度不需要OS内核 的支持,是在语言或用户库这一级处理的;而内 核级线程的创建、撤消和调度都需OS内核提供 支持,而且与进程的创建、撤消和调度大体是相 同的。
- 用户级线程执行系统调用指令时将导致其所属进 程的执行被暂停,而内核级线程执行系统调用指 令时,只导致该线程被暂停。
用户级线程和内核级线程的总结
- 在只有用户级线程的系统内,CPU调度还是以 进程为单位,处于运行状态的进程中的多个线 程,由用户程序控制线程的轮换运行;在有内 核级线程的系统内,CPU调度则以线程为单位 ,由OS的线程调度程序负责线程的调度。
- 用户级线程的程序实体是运行在用户态下的程 序,而内核级线程的程序实体则是可以运行在 任何状态下的程序。
混合的线程实现方式

线程模型
- 有些系统同时支持用户线程和内核线程,由此 产生了不同的多线程模型,即实现用户级线程 和内核级线程的不同连接方式。
- Many-to-One:将多个用户级线程映射到 一个内核级线程,线程管 理在用户空间完成。此模 式中,用户级线程对操作 系统不可见(即透明)。
- One-to-One:将每个用户级线程映射到一个内核级线程。
- Many-to-Many:将n 个用户级线程映射 到m 个内核级线程上, 要求m <= n。
二、同步与互斥
同步与互斥问题
程序的并发执行
并发是OS的设计基础,也是很多关键问题( 如:同步互斥)产生的主要原因。
- 进程的三个特征:
- 并发:体现在进程的执行是间断性的;进程的 相对执行速度是不可测的。(间断性)
- 共享:体现在进程/线程之间的制约性(如共 享打印机)(非封闭性)。
- 不确定性:进程执行的结果与其执行的相对速 度有关,是不确定的(不可再现性)
并发执行,不可避免地产生了多个进程对同一个共 享资源访问,造成了资源的争夺。
- 竞争:两个或多个进程对同一共享数据同时进行 访问,而最后的结果是不可预测的,它取决于各 个进程对共享数据访问的相对次序。这种情形叫 做竞争。
- 竞争条件:多个进程并发访问和操作同一数据且 执行结果与访问的特定顺序有关(Bernstein条件)。
- 临界资源:一次仅允许一个进程访问的资源。
- 临界区:每个进程中访问临界资源的那段代码称 为临界区。
进程的同步与互斥
- 进程互斥(间接制约关系):
- 两个或两个以上的进程,不能同时进入关于同一组共 享资源的临界区,否则可能发生与时间有关的错误。
- 进程互斥是进程间发生的一种间接性作用,一般是程 序不希望的。
- 进程同步(直接制约关系):
- 系统中各进程之间能有效地共享资源和相互合作,从 而使程序的执行具有可再现性的过程称为进程同步。
- 进程同步是进程间的一种刻意安排的直接制约关系。 即为完成同一个任务的各进程之间,因需要协调它们 的工作而相互等待、相互交换信息所产生的制约关系 。
同步与互斥的区别与联系
- 互斥:某一资源同时只允许一个访问者对其 进行访问,具有唯一性和排它性。互斥无法 限制访问者对资源的访问顺序,即访问是无 序访问。
- 同步:是指在互斥的基础上,通过其它机制 实现访问者对资源的有序访问。在大多数情 况下,同步已经实现了互斥,特别是所有对 资源的写入的情况必定是互斥的。少数情况 是指可以允许多个访问者同时访问资源。
临界区管理应满足的条件
- 没有进程在临界区时,想进入临界区的进程可 进入。
- 任何两个进程都不能同时进入临界区(Mutual Exclusion);
- 任何一个进程进入临界区的请求应该在有限时 间内得到满足(Bounded Waiting)。
- 当一个进程运行在临界区外面时,不能妨碍其 他的进程进入临界区(Progress);
机制设计上应遵循的准则
- 空闲让进:临界资源处于空闲状态,允许进程进 入临界区。临界区内仅有一个进程运行。
- 忙则等待:临界区有正在执行的进程,所有其他 进程则不可以进入临界区。
- 有限等待:对要求访问临界区的进程,应保证在 有限时间内进入自己的临界区,避免死等。
- 让权等待:当进程(长时间)不能进入自己的临 界区时,应立即释放处理机,尽量避免忙等。
基于忙等待的互斥方法
软件方法
-
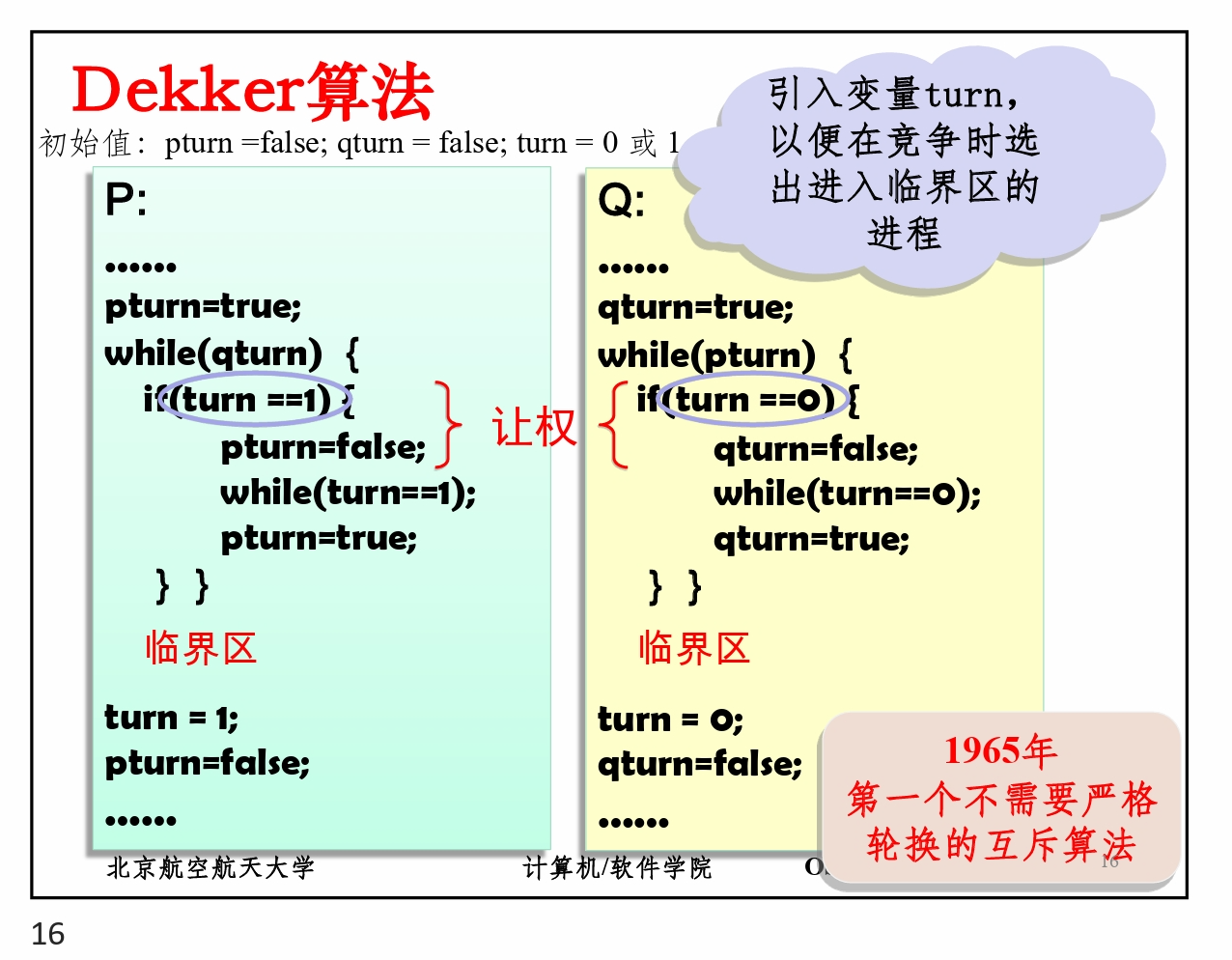
Dekker算法
-
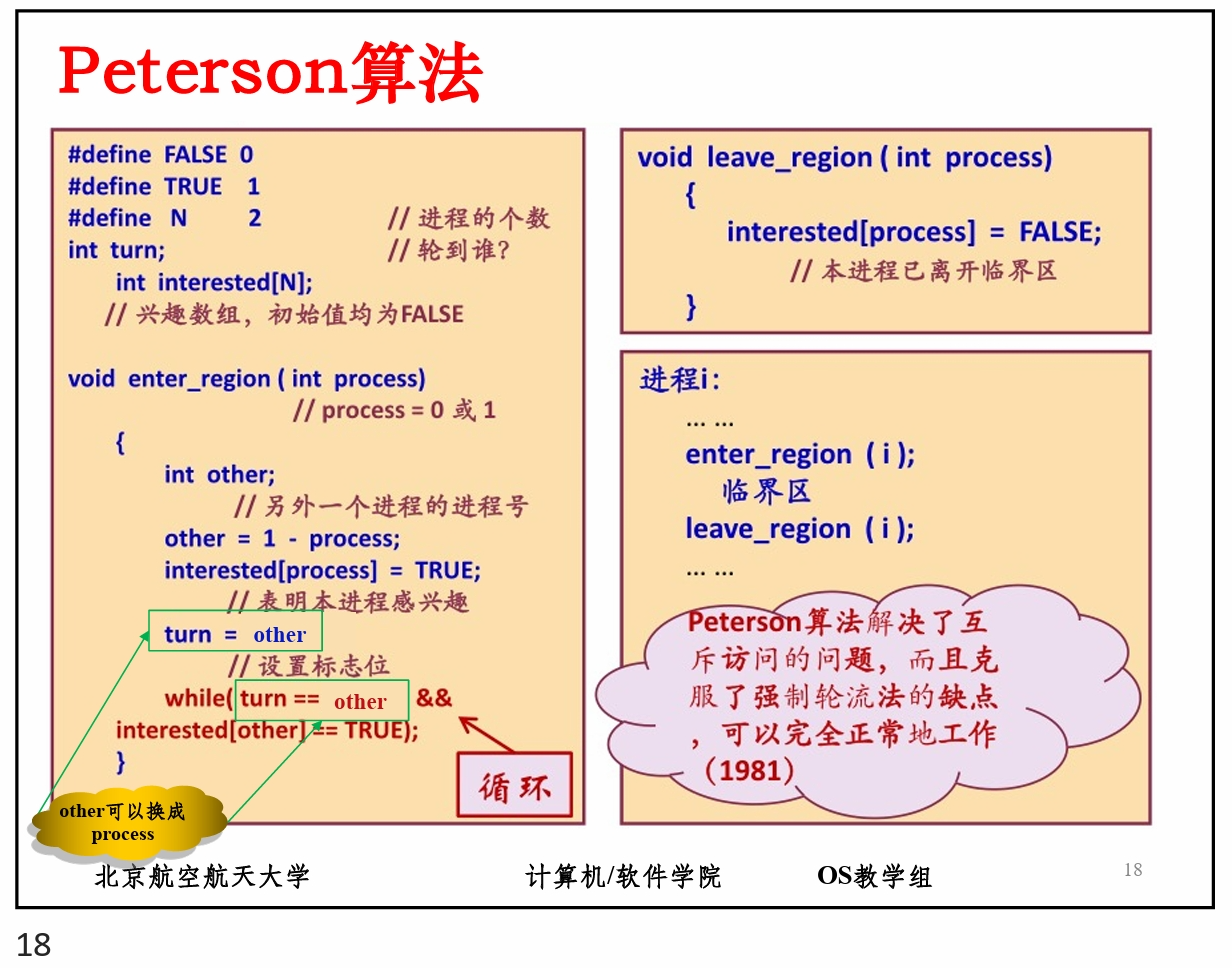
Peterson算法
硬件方案
- 中断屏蔽:使用“开/关中断”指令。
- 执行“关中断”指令,进入临界区操作;
- 退出临界区之前,执行“开中断”指令。
- 使用test and set指令:
- TS(test-and-set )是一种不可中断的基本原语(指令)。 它会把“1”写到某个内存位置并传回其旧值。在多进程可 同时访问内存的情况下,如果一个进程正在执行TS指令, 在它执行完成前,其它的进程不可以执行TS指令。
自旋锁Spinlocks
- 利用test_and_set硬件原语提供互斥支持 §通过对总线的锁定实现对某个内存位置的原子读与 更新
几个算法的共性问题
无论是软件解法(如Peterson)还是硬件(如 TSL或XCHG)解法都是正确的,它们都有一 个共同特点:当一个进程想进入临界区时,先 检查是否允许进入,若不允许,则该进程将原 地等待,直到允许为止。
- 忙等待: 浪费CPU时间
- 优先级反转:低优先级进程先进 入临界区,高优先级进程一直忙等
基于信号量的同步方法
同步实现的基本思路
- 同步中,进程经常需要等待某个条件的发生,如果使用 忙等待的解决方案,势必浪费大量CPU时间。
- 解决方法:将忙等变为阻塞,可使用两条进程间的通 信原语:Sleep和Wakeup
- Sleep原语将引起调用进程的阻塞,直到另外一个进程用 Wakeup原语将其唤醒。很明显,wakeup原语的调用需要 一个参数——被唤醒的进程ID。
信号量
- 信号量是Dijkstra1965年提出的一种方法,它使用一 个整型变量来累计唤醒次数,供以后使用。在他的 建议中引入了一个新的变量类型,称作信号量( semaphore)。
- Dijkstra建议设立两种操作,P(S)和V(S)操作。P、V 分别是荷兰语的test(proberen)和increment(verhogen) 。P操作也称为semWait,V操作也称为semSignal。 PV操作属于进程的低级通信。
- 信号量是一类特殊的变量,程序对其访问都是原子 操作,且只允许对它进行P(信号变量)和V(信号变量 )操作。
信号量的定义
- 信号量: 一个确定的二元组(s, q),其中s是一 个具有非负初值的整型变量,q是一个初始 状态为空的队列. 当发出P操作时: •
- s为正,则该值等于可立即执行的进程的数量 ;s<=0,那么发出P操作后的进程被阻塞, │s│是被阻塞的进程数。 •
- q是一个初始状态为空的队列,当有进程被阻 塞时就会进入此队列。
信号量的分类
二元信号量和一般信号量
- 二元信号量:取值仅为“0”或“1”,主要用作实 现互斥;
- 一般信号量:初值为可用物理资源的总数,用于进 程间的协作同步问题。
强信号量和弱信号量
- 强信号量:进程从被阻塞队列释放时采取FIFO–不会出现“饥饿”(某个进程长时间被阻塞)
- 弱信号量:没有规定进程从阻塞队列中移除顺序–可能出现“饥饿”
二元信号量机制
- 通常使用二元信号量的PV操作实现两个进程的 互斥。
- 应用时应注意:
- 每个进程中用于实现互斥的P、V操作必须成对出现, 先做P操作,进临界区,后做V操作,出临界区。 •
- P、V操作应分别紧靠临界区的头尾部,临界区的代 码应尽可能短,不能有死循环。
- 互斥信号量的初值一般为1。
1 | P(S) :while S<=0 do skip; |
一般信号量的结构
- 信号量的数据结构,包含:
- 一个初始值为正的整数:s.count
- 一个初始为空的队列: s.queue
- 其上定义了三个原子操作
- 初始化s
- 发送信号s: semSignal(s),(V, Up)
- 接收信号s: semWait(s) ,(P, Down)

信号量的操作
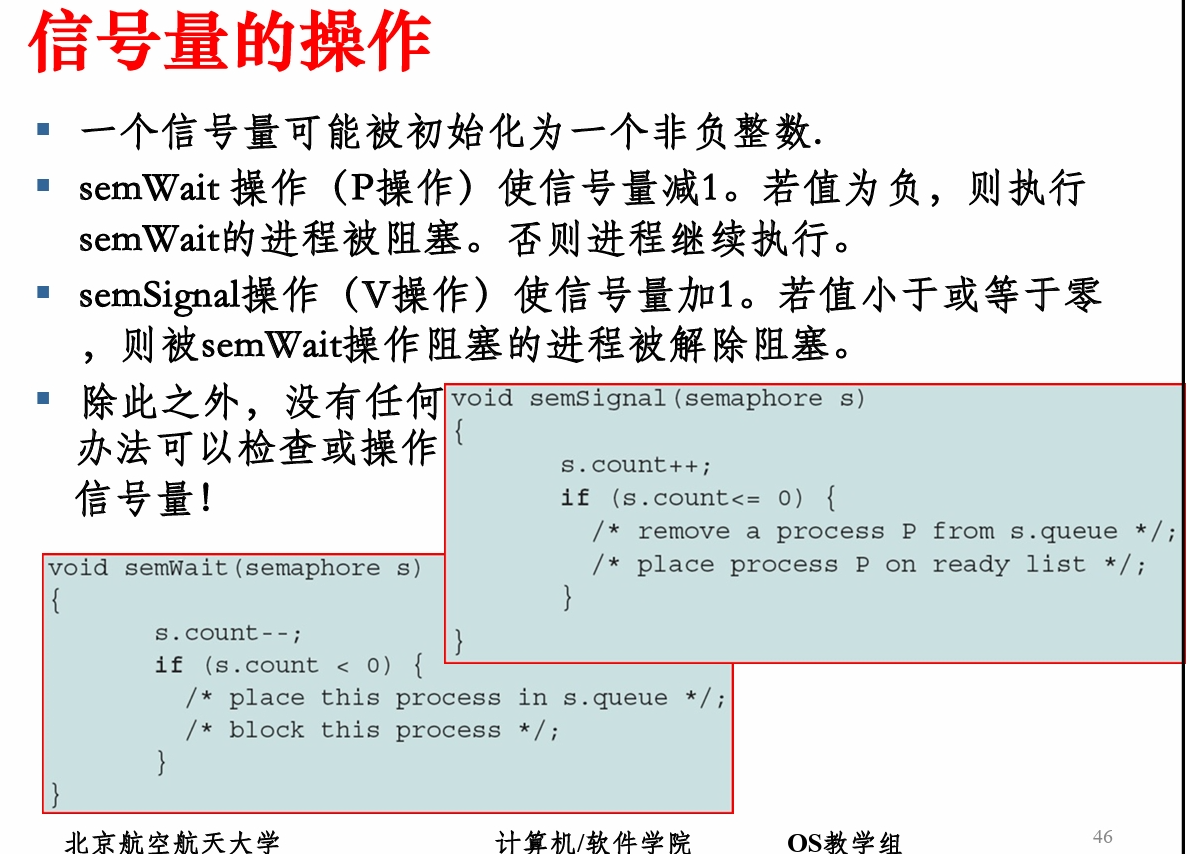
- 一个信号量可能被初始化为一个非负整数.
- semWait 操作(P操作)使信号量减1。若值为负,则执行 semWait的进程被阻塞。否则进程继续执行。
- semSignal操作(V操作)使信号量加1。若值小于或等于零 ,则被semWait操作阻塞的进程被解除阻塞。
- 除此之外,没有任何 办法可以检查或操作 信号量
“信号量集”机制
当利用信号量机制解决了单个资源的互斥访问后, 我们讨论如何控制同时需要多个资源的互斥访问。 信号量集是指同时需要多个资源时的信号量操作。
- “AND型”信号量集
- 一般信号量集


P.V操作的优缺点
- 优点: •简单,而且表达能力强(用P.V操作可解决任何 同步互斥问题)
- 缺点: •不够安全;P.V操作使用不当会出现死锁;遇到 复杂同步互斥问题时实现复杂
管程(Monitor)
- 信号量及PV 操作的问题: •信号量机制具有一些缺点,比如说用信号量及 PV 操作解决问题的时候程序编写需要很高的 技巧。 •如果没有合理地安排PV 操作的位置,就会导 致一些出错的结果,例如:出现死锁等问题。
- 管程是在程序设计语言当中引入的一种高级 同步机制。
管程的定义和组成
管程由四部分组成: 1.管程的名称; 2.局部于管程内部的共享数据 结构(变量)说明; 3.对该数据结构进行操作的一 组互斥执行的过程; 4.对局部于管程内部的共享数 据设置初始值的语句。